
SOMANET
CIRCULO
ALL-IN-ONE SERVOANTRIEB FÜR ROBOTER UND COBOTS
Die Motion-Control-Lösung für Cobots, Roboter und intelligente Aktuatoren ist direkt ohne Anpassungen einsatzbereit. So sparen Sie zusätzliche Komponenten und kostenintensive Entwicklungszeit.
5 KOMPONENTEN,
1 SERVO DRIVE
bis zu zwei integrierte Absolut-Encoder ohne extra Kabel (optional)
Funktioniert mit jeder Art von PMSM/BLDC Motoren bis zu 60 V und 60 A_rms. Optimale mechanische Integration für die meisten Kompakt-Aktuatoren
Mehr als 10 zertifizierte Safetyfunktionen (SIL3, Pl-e)
Integriertes Motorbremssystem (optional) mit sicherer Bremssteuerung
Hochleistungsservoantrieb mit höchster Motion Control Performance



MOTION CONTROL FÜR MODERNE ROBOTIK
- Höchste Performance in der Antriebsreglung/Motion Control
- Optional: Bis zu zwei integrierte High Resolution Absolut-Encoder und Motorbremse
- Zertifizierte Sicherheitsfunktionen
- Zahlreiche Sensorschnittstellen
- Optimale mechanische Integration bei gängigen Aktuatoren
- Highspeed EtherCAT Interface (DS402, bis zu 4kHz)
VOLL AUSGESTATTETES SERVO DRIVE
- Funktioniert mit jedem PMSM/BLDCMotor bis zu 60 V und 60 Arms
- Maximale Bandbreite, modellprädiktivefeldorientierte Regelung für hohe Effizienz
- Zweikreisregelung, Hochfrequenz-Regelkreise, Gain-Scheduling
- Unterstützung für 2 Positionsrückmeldungen beliebigen Typs, Drehmomentsensoren, KTY/PT1000
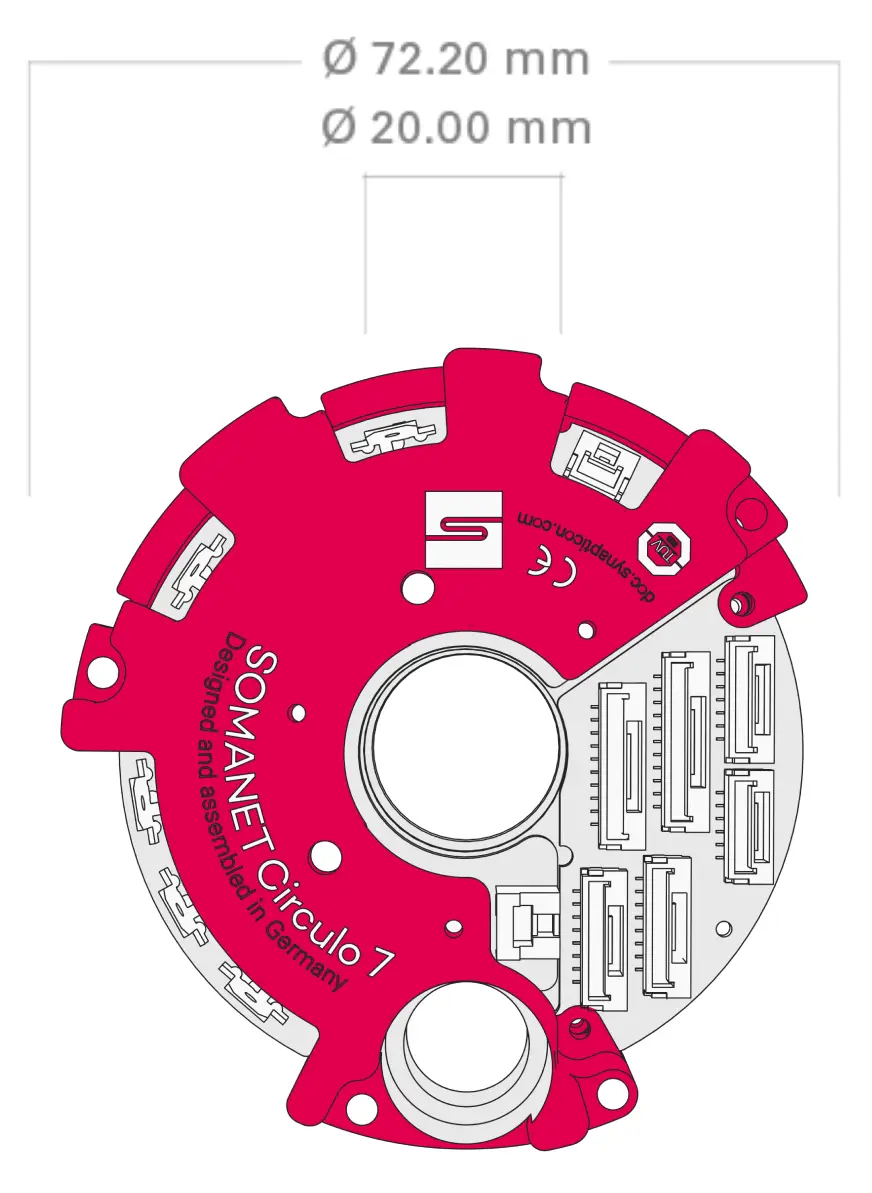
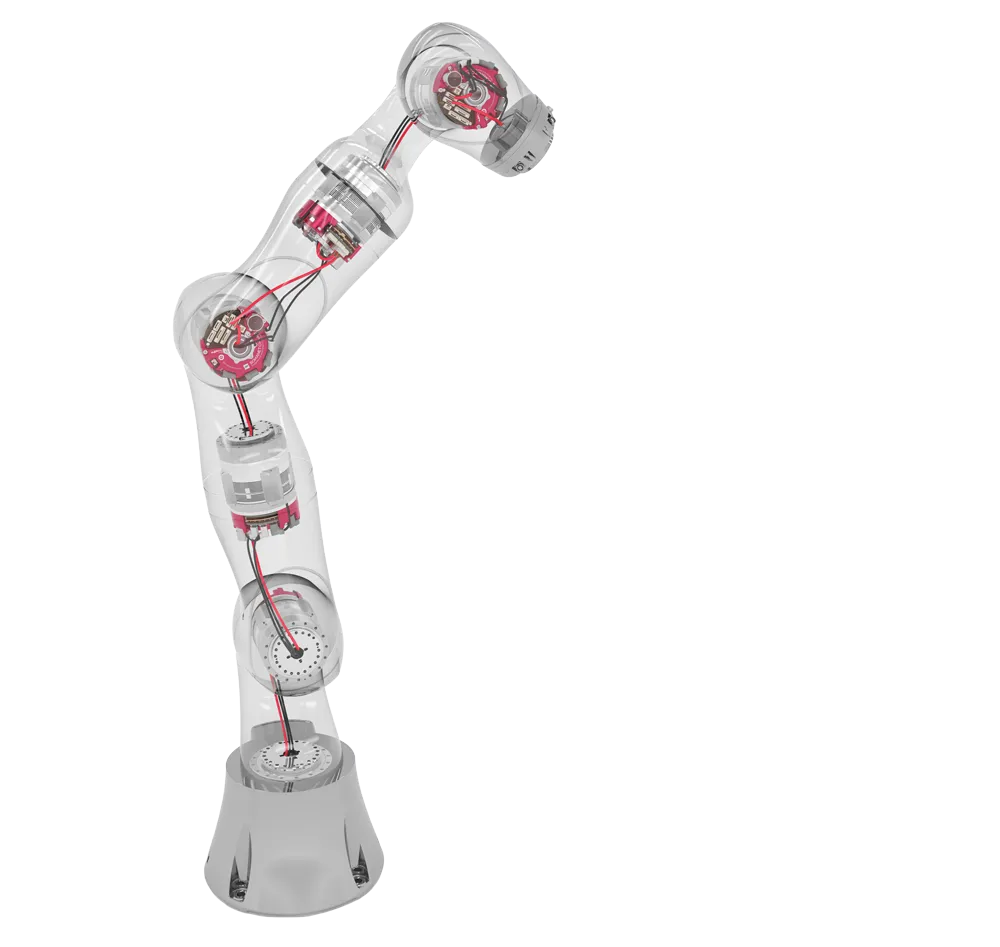
Perfekte Mecha-nische Integration

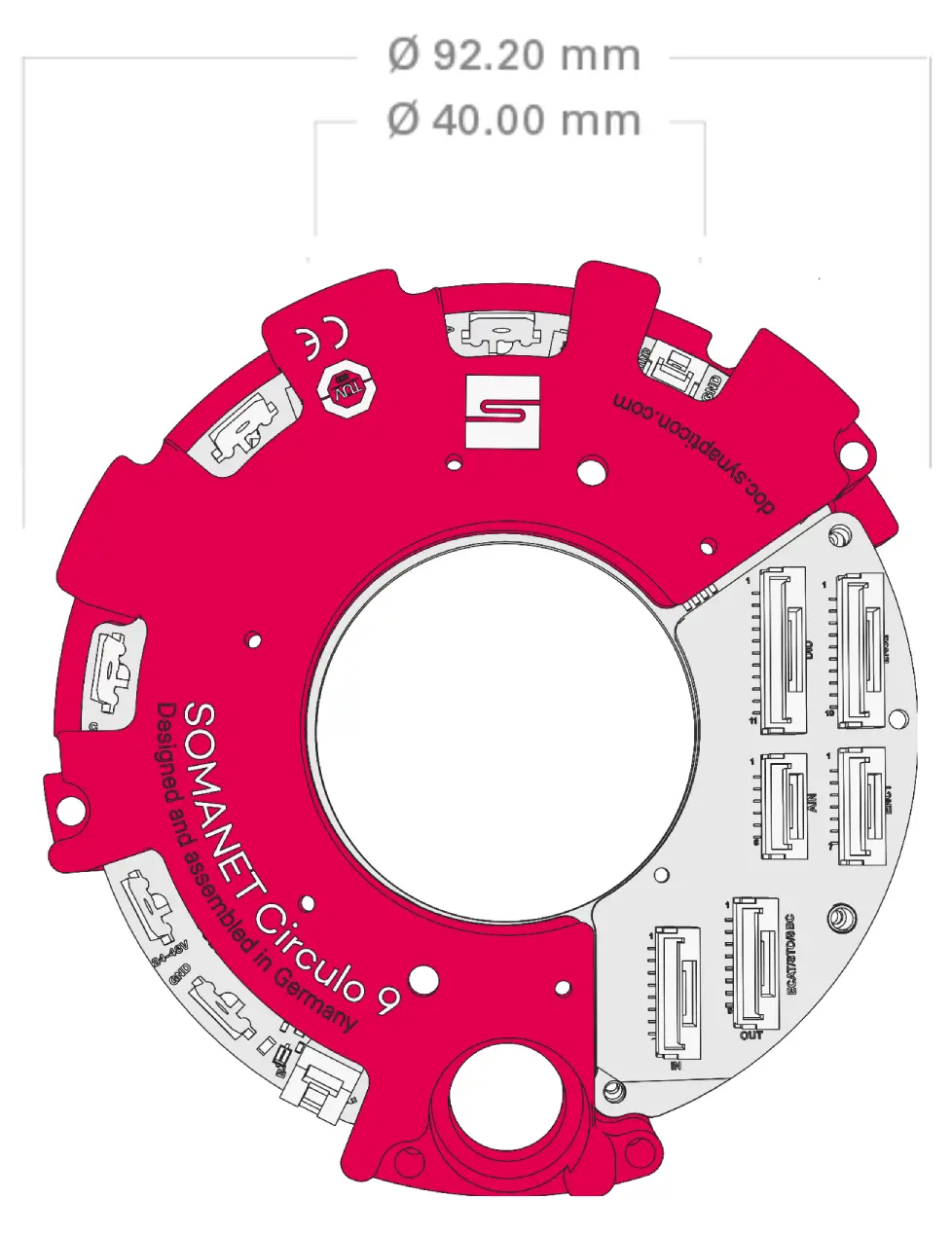
Zwei Standardgrößen für 72 und 92mm mit Hohlwellenausführung
Konzipiert für den direkten Motoranbau
für kühlen Roboter-/ Maschinenkörper
Intelligente Kabelführung
Hohe Zuverlässigkeit der
Prozesse
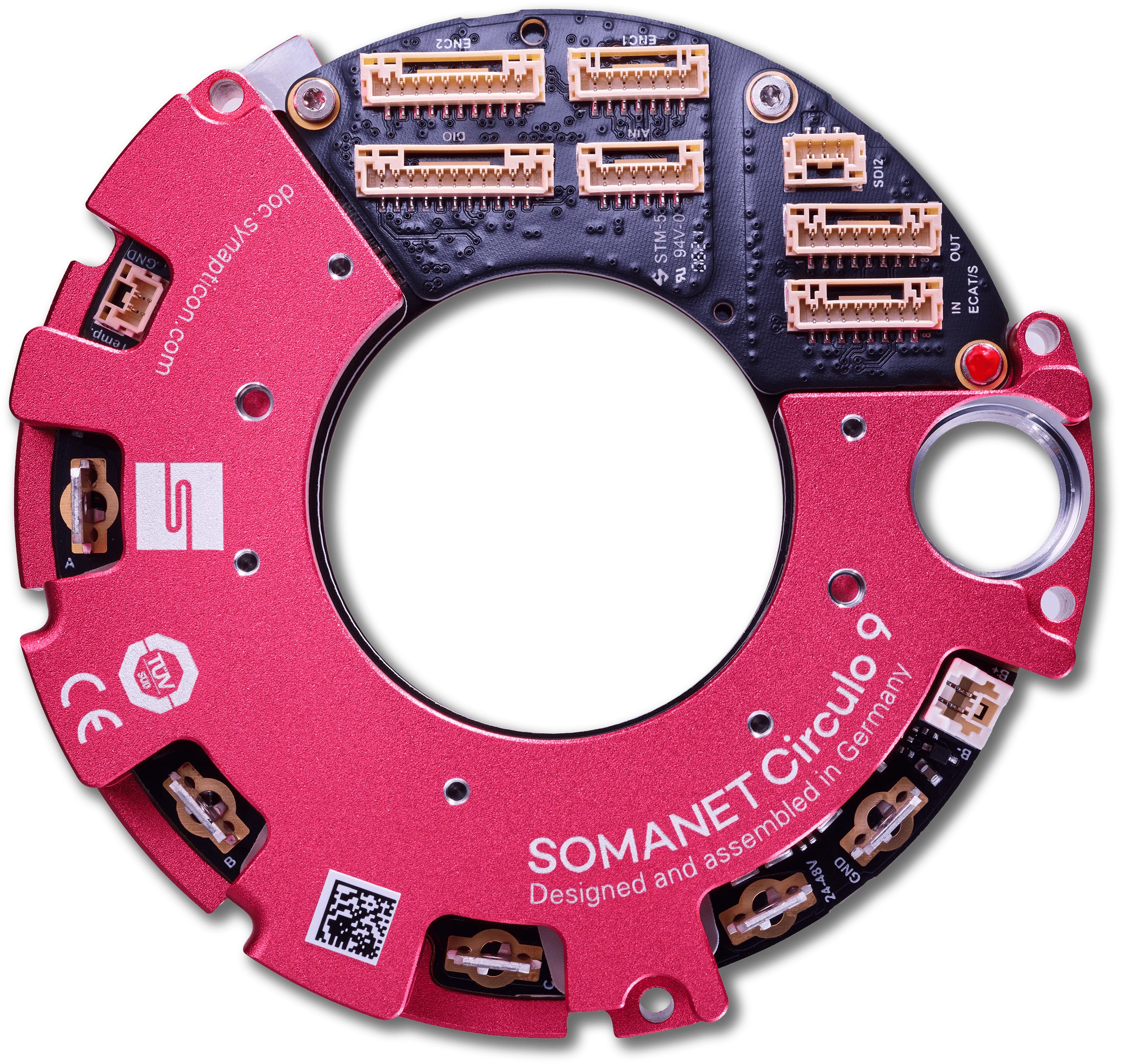
SOMANET CIRCULO IN IHREM PROJEKT
DUAL HIGH RESOLUTION ABSOLUT-ENCODER
Circulo verfügt über bis zu zwei integrierte Absolutwertgeber ohne zusätzliche Kabel und ohne lästige Werkzeuge zur Geberkalibrierung.


- 2 x magnetische Absolutwertgeber (bis zu 20 bit Auflösung)
- Dual-Loop-Konfiguration für Motor und Getriebeausgangs-Feedback
- Optionale batteriegestützte Multi-Turn-Funktionalität
- Kalibrierungs- und Diagnose-GUI im Commisioning-Tool
- Sehr niedriges Profil, unter 5 mm für beide Encoder
INTEGRIERTES BREMSSYSTEM
- Die Motordrehzahl wird auf ein niedriges Niveau reduziert, bevor die Bremse einrastet.
- Die Bremse verhindert eine ungewollte Drehbewegung des Motors (z. B. bei Stromausfall).
- Dadurch verhindert der Servo-Drive einen unerwünschten Kontakt mit dem zu bearbeitenden Werkstück bzw. zwischen Roboter und Mensch.


CERTIFIED
DIE ZUKUNFT FÜR ECHTE MENSCH-ROBOTER-KOLLABORATION ist jetzt
STO verhindert ein ungeplantes Wiederanlaufen des Laufwerks. STO ermöglicht sicheres Arbeiten und hat ein breites Einsatzspektrum bei bewegten Achsen.
SBC ermöglicht die sichere Ansteuerung einer Haltebremse. Die Funktion wird immer parallel zu STO aktiviert und mit STO oder SS1 verwendet. Das verhindert die Bewegung einer Achse im drehmomentfreien Zustand.
...
Die SS1-Funktion bewirkt ein schnelles und sicheres Anhalten des Motors und führt zu einem Stillstand.
Die SS2-Funktion schaltet einen Motor schnell und sicher ab. Wenn der Motor stillsteht, wird ein sicherer Betriebsstopp (SOS) ausgelöst.
SLS stellt sicher, dass der Antrieb eine definierte Drehzahlgrenze nicht überschreitet und löst bei Überschreiten eine Fehlerreaktion aus.
Die Sicherheitsfunktion überwacht, dass der Antrieb (und damit das vom Antrieb bewegte Element) definierte Endlagen nicht überschreitet.
Sicher begrenztes Drehmoment. Die Funktion SLT ermöglicht die Reduzierung des Drehmomentes innerhalb einer definierten Zeit.Wenn das Drehmoment die SLT-Überwachungsgrenze überschreitet, reagiert derAntrieb mit einem "sicheren Stopp".
via FSoE (7 ms cycle time)
via FSoE (7 ms cycle time)
via FSoE (7 ms cycle time) - beim Anschluss eines sicheren Torque Sensors am sicheren analogen Eingang.
via FSoE (7 ms cycle time)
SAFETY FIRST
Das optionale Safe-Motion-Modul für Circulo ermöglicht sichere Bewegungsfunktionen auf SIL3, PL-e Niveau über FSoE (FailSafe over EtherCAT). Realisieren Sie Ihre Applikation gemäß ISO/TS 15066.

WEITERE PRODUKTE





