
Was ist POSITRON Safety AI? POSITRON Safety AI ist Synapticons KI-basierte Sicherheitsarchitektur für humanoide Roboter — die erste zertifizierbare Lösung, die mechanische Instabilität und nicht-deterministisches KI-Verhalten gleichzeitig adressiert. Das neue Whitepaper „Out of the Cage: Advanced Functional Safety for Humanoids“ von Dr.-Ing. Florian Weißhardt, Dr.-Ing. Tim Fröhlich und Dieter Volpert beschreibt die Architektur im Detail.
WARUM KLASSISCHE SAFETY FÜR HUMANOIDE NICHT FUNKTIONIERT
Humanoide Roboter sind instabile invertierte Pendel. Ein klassischer Safe Torque Off (STO) — der bewährte „Stop Category 0“ aus der Industrierobotik — führt bei einem zweibeinigen Roboter nicht zum sicheren Stillstand, sondern zum unkontrollierten Sturz. Der Roboter wird selbst zur Gefahr. Die Autoren zeigen, dass die gesamte Sicherheitsphilosophie für humanoide Systeme neu gedacht werden muss.
DREI VERTEIDIGUNGSLINIEN: DIE ARCHITEKTUR VON POSITRON SAFETY AI
POSITRON Safety AI adressiert das Problem mit einer dreistufigen Sicherheitsarchitektur, die auf SOMANET™ Servo Drives und dem FSoE-Backbone (Fail-Safe over EtherCAT) aufbaut:
Tier 1 — Multi-Axis Safe Motion: Sicherheitsfunktionen auf Hardware-Ebene für mehr als 50 Freiheitsgrade gleichzeitig. Statt den Roboter abzuschalten, hält Safe Active Damping ihn kontrolliert aufrecht. Safely-Limited Speed (SLS) und Safely-Limited Torque (SLT) werden dezentral in jedem Antrieb überwacht — eine verteilte Intelligenz, die mit der Komplexität humanoider Kinematiken skaliert.
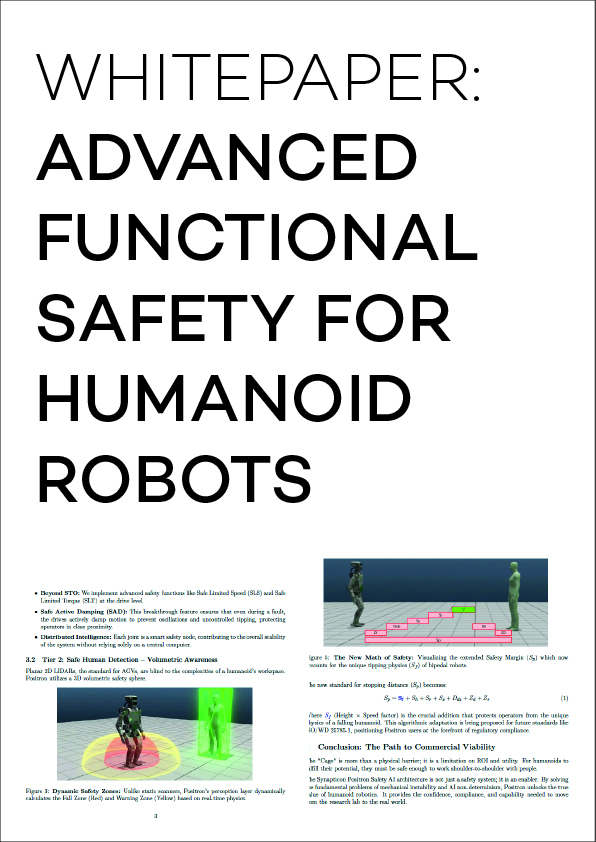
Tier 2 — Safe Human Detection: Ein 3D-volumetrisches Sicherheitssystem erkennt Personen im Umfeld des Roboters in Echtzeit. Dynamische Sicherheitszonen passen sich kontinuierlich an — basierend auf der tatsächlichen Fallzone des Roboters, nicht auf statischen Mindestabständen. Die Umsetzung folgt IEC 62998 für kamerabasierte Schutzsysteme.
Tier 3 — AI Behavioral Safety: Multimodale Foundation Models analysieren die Szene semantisch und ermöglichen kontextbewusste Sicherheitsentscheidungen (Safe Situational Motion). Dabei trennt die Architektur konsequent den deterministischen Safety-Loop von der nicht-deterministischen KI-Steuerung — konform zu ISO/IEC TR 5469 und ISO/IEC TS 22440.
DIE ERWEITERTE SICHERHEITSFORMEL: FALLZONE ALS NEUER PARAMETER
Eine zentrale Innovation des Whitepapers ist die erweiterte Sicherheitsabstandsformel:
S_p = S_f + S_h + S_r + S_s + D_ds + Z_d + Z_r
Der entscheidende neue Term S_f beschreibt die Fallzone — den Bereich, den ein stürzender humanoider Roboter überstreichen kann. Dieser Parameter existiert in keiner klassischen Sicherheitsnorm für Industrieroboter, ist aber für aufrecht gehende Maschinen physikalisch zwingend erforderlich.
SAFETY ALS ENABLER — NICHT ALS EINSCHRÄNKUNG
Die Kernbotschaft des Whitepapers: Functional Safety ist nicht das Hindernis, das humanoide Roboter in der Fabrikhalle oder im öffentlichen Raum zurükhält — sie ist der Schlüssel, der den Käfig öffnet. Wer Safety nicht als nachträgliche Pflichtübung, sondern als integralen Bestandteil der Architektur begreift, schafft die Voraussetzung für den Einsatz humanoider Roboter außerhalb kontrollierter Laborumgebungen.

