en

N°1
一体化
运动控制
运动控制

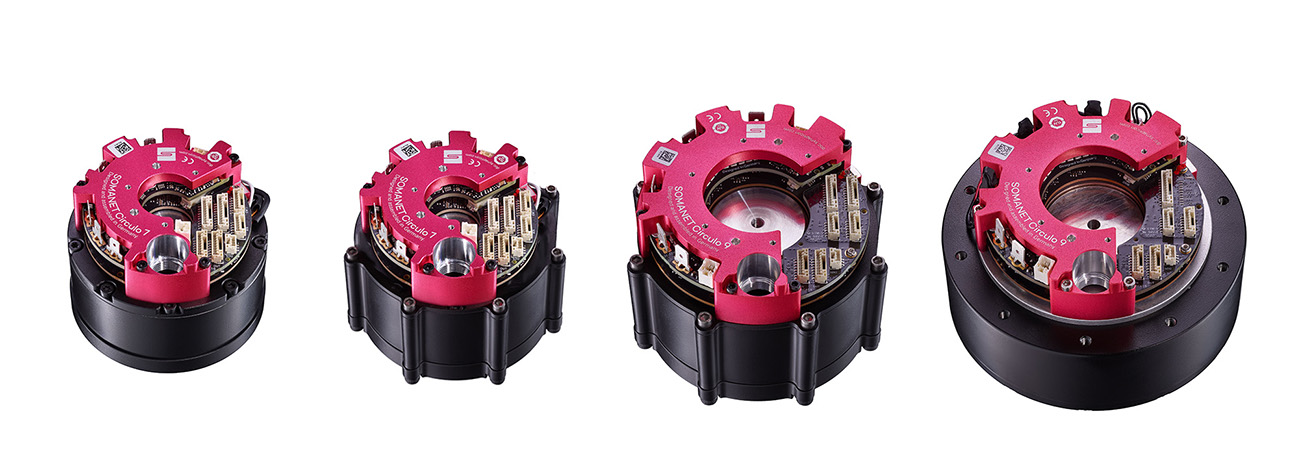

Actilink JD 产品系列经过开发和测试,确保了卓越的性能,这主要归功于其智能化设计,可在极小的空间内容纳高功率传输和低反冲的齿轮箱、高动态电机以及高功率密度和低功耗的伺服驱动器。
该系统的开发旨在支持模块化机器人架构,从而更容易扩展系统或使其适应新的应用。这种灵活性对于物流和制造等需求经常变化的行业尤为有益。

| AJD-08-20-400 | ||||
|---|---|---|---|---|
| 项目 | ECS1SS | ECD2SS | ECD2SM | |
| 供电电压范围 | V | 24 - 48 V,48 V 标称值,60 V 峰值 | 25 - 48 V,48 V 标称值,60 V 峰值 | 26 - 48 V,48 V 标称值,60 V 峰值 |
| 扭矩密度(峰值) | 牛米/千克 | 33.3 | 27.4 | 26.6 |
| 额定输出功率 | W | 170 | 170 | 170 |
| 最大加速扭矩 | Nm | 17 | 17 | 17 |
| 额定扭矩 | Nm | 6 | 6 | 6 |
| 无负载转速 | 转速 | 400 | 400 | 400 |
| 重量 | g | 510 | 620 | 640 |
| 外径 | 毫米 | 78,5 | 78,5 | 78,5 |
| 长度 * | 毫米 | 65,5 | 73 | 73 |
| 齿轮类型 | 单级行星齿轮 | 单级行星齿轮 | 单级行星齿轮 | |
| 减少比率 | 7,75 | 7,75 | 7,75 | |
| 反弹 | 角分 | < 22 | < 22 | < 22 |
| 电机编码器 | 19位绝对值,电池多圈 ** | 19位绝对值,电池多圈 ** | 19位绝对值,电池多圈 ** | |
| 输出编码器 | - | 20 位绝对齿轮输出 | 20 位绝对齿轮输出 | |
| 通信协议 | EtherCAT DS402 | EtherCAT DS402 | EtherCAT DS402 | |
| 安全功能 | STO-SBC | STO-SBC | 通过 FSoE 实现安全运动(SIL 3、PL e、Cat. 3) |

| AJD-09-30-500 | ||||
|---|---|---|---|---|
| 项目 | ECS1SS | ECD2SS | ECD2SM | |
| 供电电压范围 | V | 27 - 48 V,48 V 标称值,60 V 峰值 | 28 - 48 V,48 V 标称值,60 V 峰值 | 29 - 48 V,48 V 标称值,60 V 峰值 |
| 扭矩密度(峰值) | 牛米/千克 | 44.1 | 37.5 | 待定 |
| 额定输出功率 | W | 400* | 400* | 400* |
| 最大加速扭矩 | Nm | 30 | 30 | 30 |
| 额定扭矩 | Nm | 11 | 11 | 11 |
| 无负载转速 | 转速 | 470 | 470 | 470 |
| 重量 | g | 680 | 800 | 810 |
| 外径 | 毫米 | 88 | 88 | 88 |
| 长度 * | 毫米 | 70,29 | 79,29 | 79,29 |
| 齿轮类型 | 单级行星齿轮 | 单级行星齿轮 | 单级行星齿轮 | |
| 减少比率 | 9 | 9 | 9 | |
| 反弹 | 角分 | 28 | 28 | 28 |
| 电机编码器 | 19位绝对值,电池多圈 ** | 19位绝对值,电池多圈 ** | 19位绝对值,电池多圈 ** | |
| 输出编码器 | - | 20 位绝对齿轮输出 | 20 位绝对齿轮输出 | |
| 通信协议 | EtherCAT DS402 | EtherCAT DS402 | EtherCAT DS402 | |
| 安全功能 | STO-SBC | STO-SBC | 通过 FSoE 实现安全运动(SIL 3、PL e、Cat. 3) |

| AJD-10-60-200 | ||||
|---|---|---|---|---|
| 项目 | ECS1SS | ECD2SS | ECD2SM | |
| 供电电压范围 | V | 30 - 48 V,48 V 标称值,60 V 峰值 | 31 - 48 V,48 V 标称值,60 V 峰值 | 32 - 48 V,48 V 标称值,60 V 峰值 |
| 扭矩密度(峰值) | 牛米/千克 | 57.1 | 48.8 | 47.8 |
| 额定输出功率 | W | 380 | 380 | 380 |
| 最大加速扭矩 | Nm | 60 | 60 | 60 |
| 额定扭矩 | Nm | 20 | 20 | 20 |
| 无负载转速 | 转速 | 210 | 210 | 210 |
| 重量 | g | 1050 | 1230 | 1255 |
| 外径 | 毫米 | 106 | 106 | 106 |
| 长度 * | 毫米 | 72,8 | 86,3 | 86,3 |
| 齿轮类型 | 单级行星齿轮 | 单级行星齿轮 | 单级行星齿轮 | |
| 减少比率 | 9 | 9 | 9 | |
| 反弹 | 角分 | < 13 | < 13 | < 13 |
| 电机编码器 | 20 位绝对值,电池多圈 ** | 20 位绝对值,电池多圈 ** | 20 位绝对值,电池多圈 ** | |
| 输出编码器 | - | 20 位绝对齿轮输出 | 20 位绝对齿轮输出 | |
| 通信协议 | EtherCAT DS402 | EtherCAT DS402 | EtherCAT DS402 | |
| 安全功能 | STO-SBC | STO-SBC | 通过 FSoE 实现安全运动(SIL 3、PL e、Cat. 3) |

| AJD-12-120-200 | ||||
|---|---|---|---|---|
| 项目 | ECS1SS | ECD2SS | ECD2SM | |
| 供电电压范围 | V | 33 - 48 V,48 V 标称值,60 V 峰值 | 34 - 48 V,48 V 标称值,60 V 峰值 | 35 - 48 V,48 V 标称值,60 V 峰值 |
| 扭矩密度(峰值) | 牛米/千克 | 69.6 | 59.6 | 58.8 |
| 额定输出功率 | W | 700 | 700 | 700 |
| 最大加速扭矩 | Nm | 110 | 110 | 110 |
| 额定扭矩 | Nm | 40 | 40 | 40 |
| 无负载转速 | 转速 | 200 | 200 | 200 |
| 重量 | g | 1580 | 1845 | 1870 |
| 外径 | 毫米 | 120 | 120 | 120 |
| 长度 * | 毫米 | 72,8 | 85,5 | 85,5 |
| 齿轮类型 | 单级行星齿轮 | 单级行星齿轮 | 单级行星齿轮 | |
| 减少比率 | 9 | 9 | 9 | |
| 反弹 | 角分 | < 11 | < 11 | < 11 |
| 电机编码器 | 20 位绝对值,电池多圈 ** | 20 位绝对值,电池多圈 ** | 20 位绝对值,电池多圈 ** | |
| 输出编码器 | - | 20 位绝对齿轮输出 | 20 位绝对齿轮输出 | |
| 通信协议 | EtherCAT DS402 | EtherCAT DS402 | EtherCAT DS402 | |
| 安全功能 | STO-SBC | STO-SBC | 通过 FSoE 实现安全运动(SIL 3、PL e、Cat. 3) |
