
소마넷
서큘로
로봇 및 협동로봇용 올인원 서보 드라이브
코봇, 로봇 및 지능형 액추에이터를 위한 모션 제어 솔루션은 별도의 조정 없이 즉시 사용할 수 있습니다. 따라서 추가 구성 요소와 비용 집약적인 개발 시간을 절약할 수 있습니다.
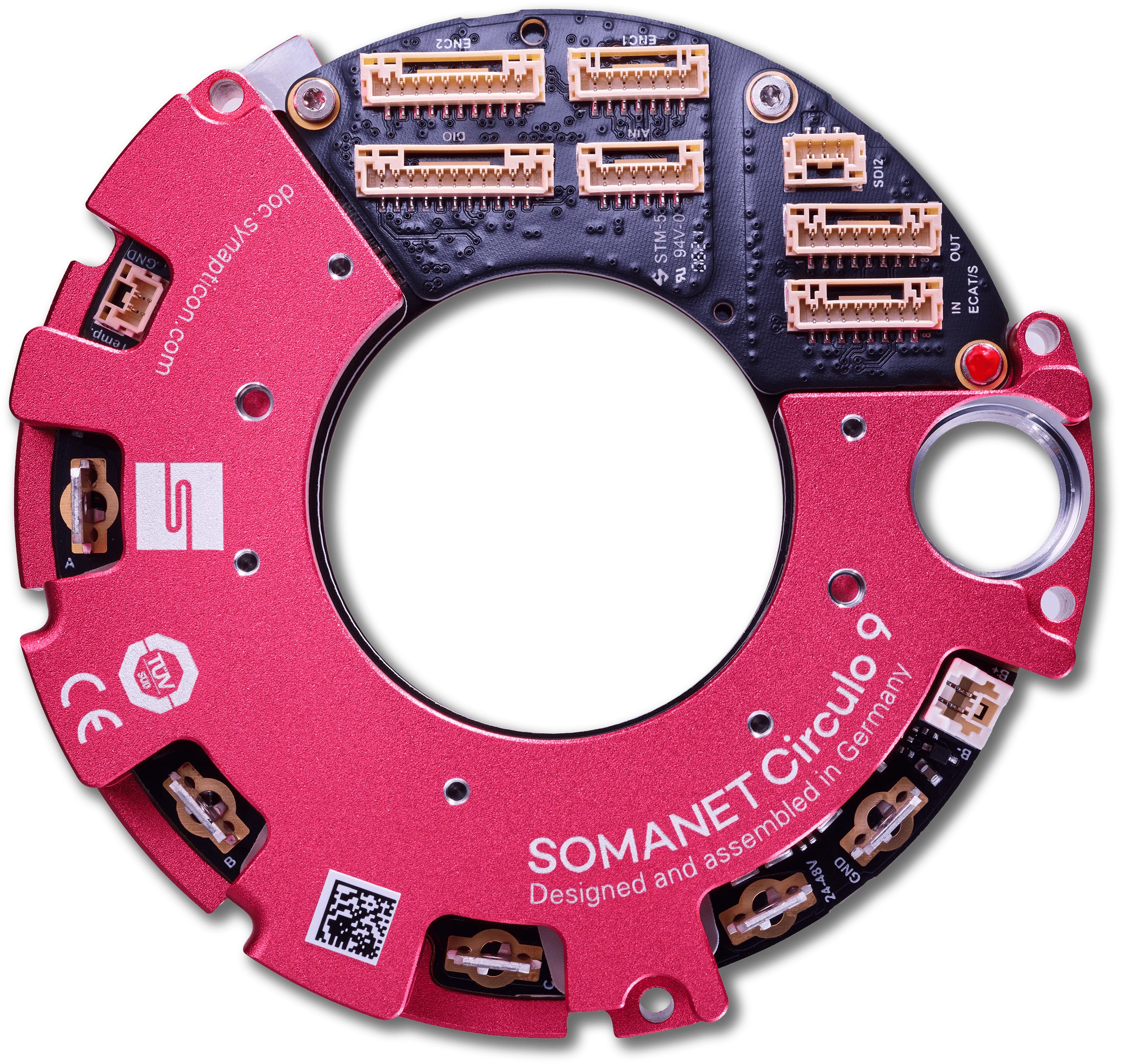
5개 구성품,
서보 드라이브 1개
추가 케이블 없이 최대 2개의 통합형 앱솔루트 엔코더(옵션)
최대 60V 및 60A_rms의 모든 유형의 PMSM/BLDC 모터와 함께 작동합니다. 대부분의 소형 액추에이터를 위한 최적의 기계적 통합
10가지 이상의 인증된 안전 기능(SIL3, Pl-e)
안전 브레이크 제어 기능이 있는 통합 모터 브레이크 시스템(옵션)
모션 제어 성능을 극대화한 고성능 서보 드라이브



최신 로봇 공학을 위한 모션 제어
- 최고 성능의 드라이브 제어/모션 제어
- 옵션: 최대 2개의 통합 고해상도 앱솔루트 엔코더 및 모터 브레이크
- 인증된 안전 기능
- 다양한 센서 인터페이스
- 일반적인 액추에이터와 최적화된 기계적 통합
- 고속 EtherCAT 인터페이스(DS402, 최대 4kHz)
모든 기능이 탑재된 서보 드라이브
- 최대 60V 및 60암의 모든 PMSM/BLDC 모터와 함께 사용 가능
- 고성능을 위한 모델 기반 예측 FOC(Field-Oriented Control) 및 최대 제어 대역폭 구현
- 듀얼 루프 제어, 고주파 제어 루프, 게인 스케줄링
- 모든 유형의 위치 피드백 신호 2개, 토크 센서, KTY/PT1000 지원
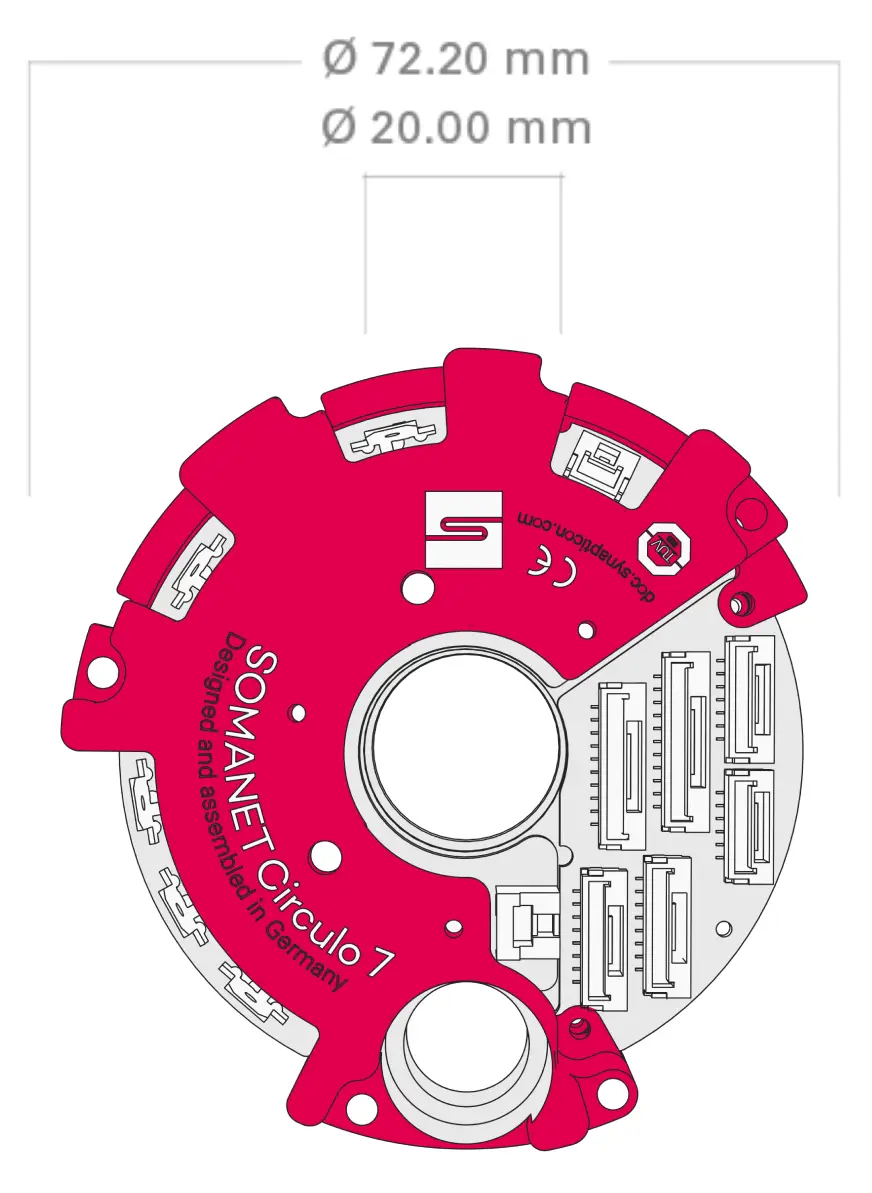
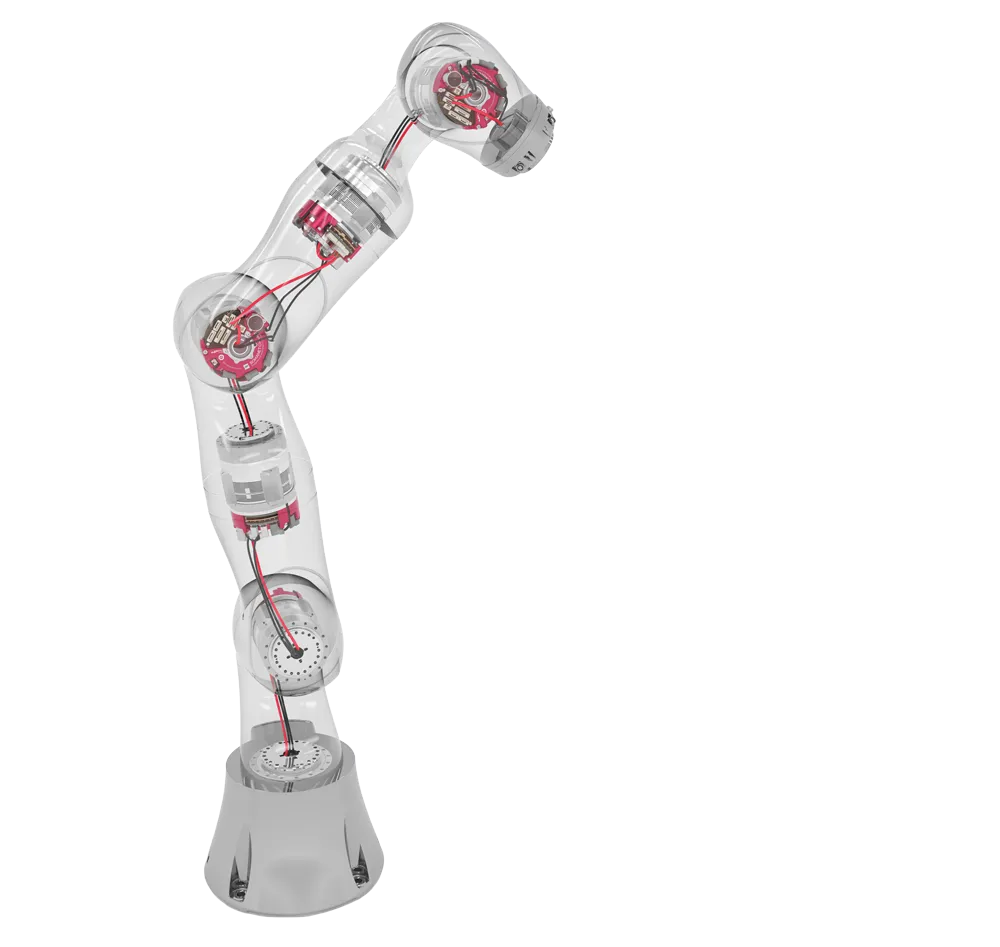
완벽한 기계적 통합

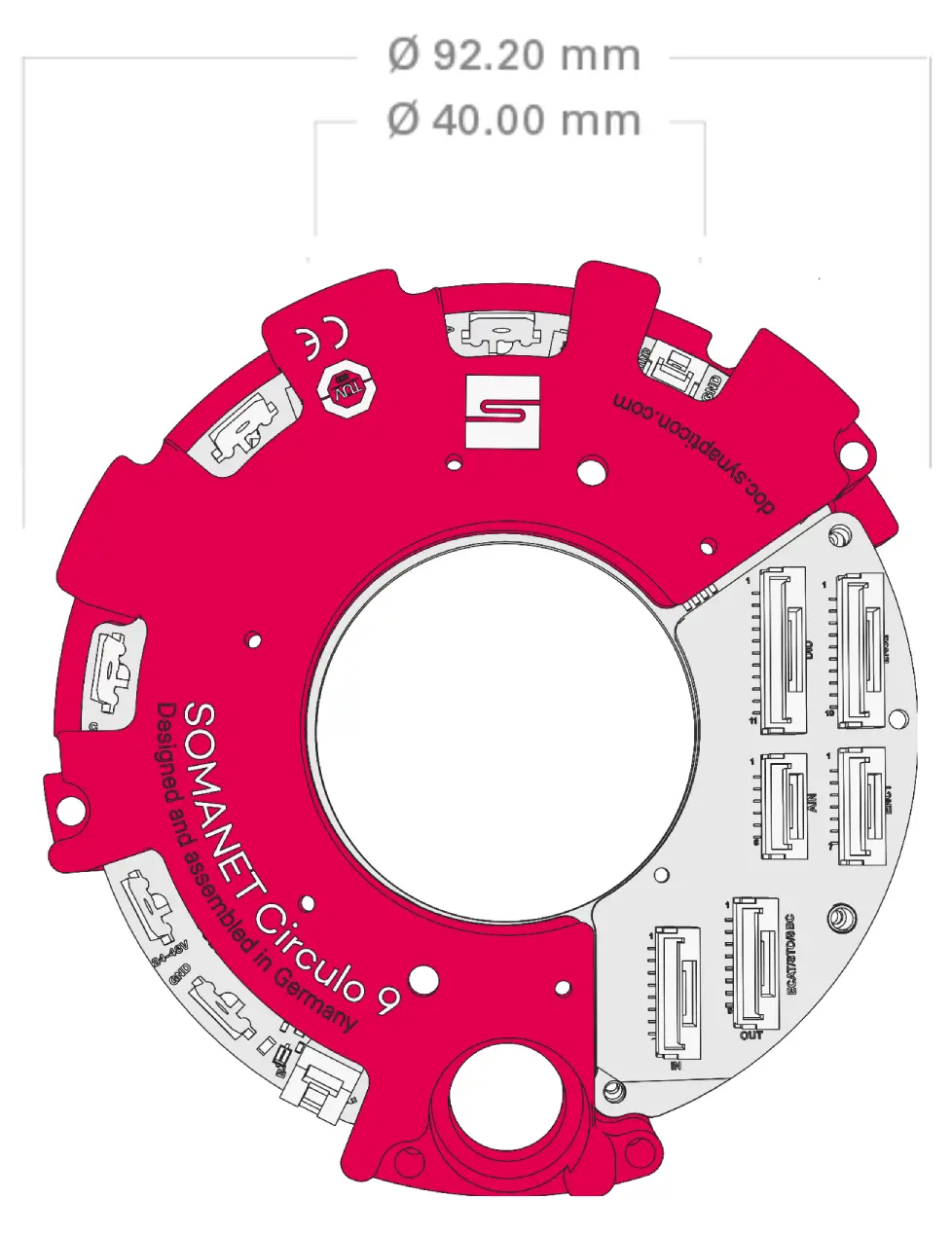
중공축 설계의 72 및 92mm 두 가지 표준 크기
모터 직접 장착용 설계
↪f_200D↩
시원한 로봇/기계 본체를 위한
지능형 케이블 라우팅
프로세스의 높은 신뢰성
프로젝트의 소마넷 서큘로
듀얼 고해상도 앱솔루트 엔코더
Circulo는 추가 케이블 없이 최대 2개의 앱솔루트 엔코더가 통합되어 있으며 엔코더 보정을 위한 번거로운 도구가 필요 없습니다.


- 앱솔루트 엔코더 2개(최대 20비트 해상도, 자석타입)
- 모터 및 기어박스 출력 피드백을 위한 듀얼 루프 구성
- 멀티턴 기능(옵션, 배터리로 작동)
- 커미셔닝 도구의 캘리브레이션 및 진단 GUI
- 두 엔코더 모두 5mm 미만의 매우 낮은 높이
통합 브레이크 시스템
- 브레이크가 작동하기 전에 모터 속도가 낮은 수준으로 감소합니다.
- 브레이크는 모터가 의도치 않게 회전하는 것을 방지합니다(예: 정전 발생 시).
- 이러한 방식으로 서보 드라이브는 처리 중인 공작물이나 로봇과 사람 사이의 원치 않는 접촉을 방지합니다.


인증
진정한 인간-로봇 협업의 미래는 지금입니다.
STO(Safe Torque Off)는 드라이브가 의도치 않게 다시 작동하는 것을 방지하여, 안전한 작업을 가능하게 합니다. 이 기능은 다양한 구동축 애플리케이션에 폭넓게 적용할 수 있습니다.
SBC(Safe Brake Control)는 홀드 브레이크를 안전하게 제어할 수 있도록 하며, 항상 STO와 동시에 활성화되며 STO 또는 SS1 기능과 함께 사용됩니다. 이를 통해 드라이브 토크가 제거된 상태에서도 축이 움직이지 않도록 안전을 확보합니다.
...
SS1(Safe Stop 1) 기능은 모터를 신속하고 안전하게 감속 및 정지시키며, 이후 정지 상태로 전환됩니다.
SS2(Safe Stop 2) 기능은 모터를 신속하고 안전하게 차단하고, 정지 후에는 안전 동작 정지(SOS) 상태로 전환됩니다.
SLS(Safely Limited Speed)는 드라이브가 설정된 속도 한계를 초과하지 않도록 모니터링하며, 한계를 초과하면 즉시 오류 반응을 트리거합니다.
안전 기능은 드라이브(따라서 드라이브에 의해 움직이는 요소)가 정의된 끝 위치를 초과하지 않는지 모니터링합니다.
SLT(Safely Limited Torque)는 토크를 사전에 정의된 시간 안에 안전하게 감쇠시키는 기능입니다. 설정된 SLT 한계를 초과하면 드라이브는 즉시 안전 정지(Safe Stop) 동작을 수행합니다.
FSoE를 통해(7ms 주기 시간)
FSoE를 통해(7ms 주기 시간)
사이클 타임 7ms의 FSoE(FailSafe over EtherCAT)를 통해, 안전 아날로그 입력 단자에 안전 토크 센서를 연결할 수 있습니다.
FSoE를 통해(7ms 주기 시간)
SAFETY FIRST
Circulo의 옵션 Safe-Motion 모듈은 FSoE(FailSafe over EtherCAT)를 기반으로 SIL3, PL-e 수준의 안전 모션 기능을 지원합니다. ISO/TS 15066에 부합하는 애플리케이션을 구현해 보세요.

더 많은 제품





