사용 사례

AMR 구동 장치 및 리프트 시스템
모바일 로봇은 구동축, 리프트, 조향축 등 각 축마다 서로 다른 기계적 구조가 필요합니다. 맞춤형 액추에이터를 사용하면 기계적 구조가 매우 다른 경우에도 일관된 구동 및 소프트웨어 설계가 가능하며, 동시에 대량 생산에도 완벽하게 대응할 수 있습니다.
인간형 관절 액추에이터
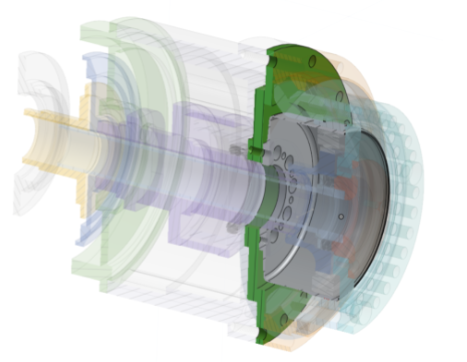
로봇 본체에 통합된 하우징을 갖춘, 관절별 치수에 맞춰 설계된 액추에이터입니다. 불필요한 재료나 무게가 없습니다. 고관절과 손목 관절은 가격과 무게가 서로 다를 수 있습니다.

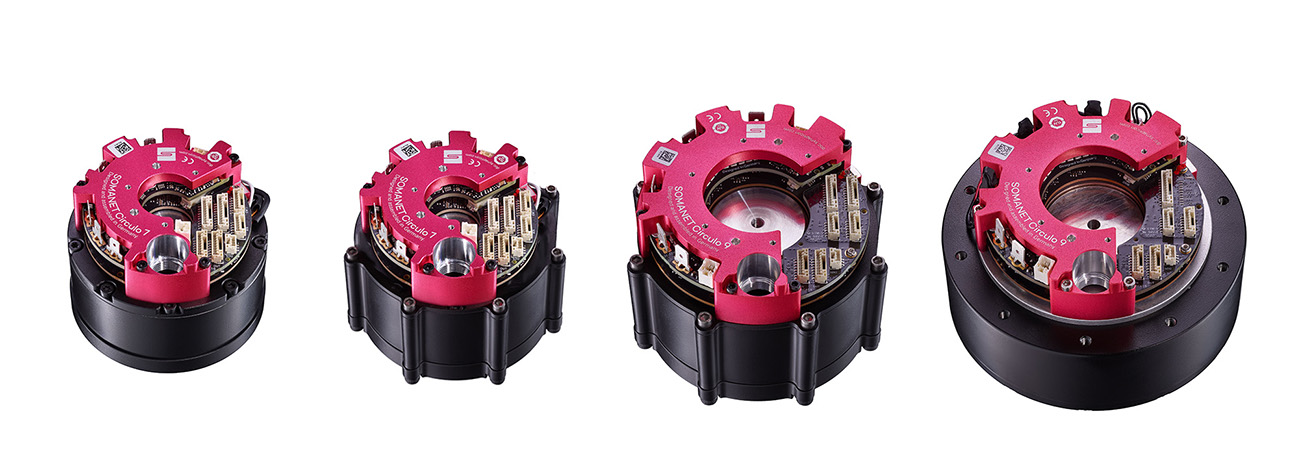
볼륨
의 코봇 조인트 표준 제품은 코봇 프로토타입 제작에 이상적입니다. 양산 단계에서는 코봇 조인트가 맞춤형 액추에이터로 전환되어 암의 기계적 설계에 완벽하게 통합되며, BOM 비용은 현저히 절감됩니다.
로봇 개 및 사족 보행 로봇
평평하고 무게가 최적화된 하우징에 장착 가능한 고동적 액추에이터. ACTILINK-JD를 플랫폼 기반으로 하고, 특정 다리 설계에 맞춘 맞춤형 메커니즘을 적용했습니다.

토크 측정 기능이 통합된 Precision Robotics
의료용 로봇, 반도체 장비 및 높은 힘 정밀도가 요구되는 협업 응용 분야를 위한 듀얼 채널 토크 센서와 SIL3 PLe 안전 아키텍처를 갖춘 맞춤형 액추에이터.
자주 묻는 질문
Q: 커스텀 액추에이터는 ACTILINK-JD 또는 ACTILINK-JP와 어떻게 다른가요?
A: ACTILINK-JD와 ACTILINK-JP는 당사의 표준 액추에이터로, 즉시 공급 가능하며 문서화가 잘 되어 있어 시제품 및 중량 생산에 적합합니다. 커스텀 액추에이터는 기계적 구조, 인터페이스 또는 생산량이 표준 제품의 범위를 벗어날 때 제작됩니다.
Q: 커스텀 액추에이터는 휴머노이드 로봇에 적합한가요?
A: 네, 휴머노이드 로봇은 커스텀 액추에이터의 가장 강력한 수요원 중 하나입니다. 각 관절마다 요구 사항이 다릅니다. 엉덩이와 무릎은 높은 토크와 완벽한 기능 안전성이 필요하고, 어깨와 손목은 소형화와 경량화가 더 중요합니다. 저희는 관절별 안전 등급, 로봇 본체를 방열판으로 활용, 관절별 컴퓨팅을 적용하여 각 관절에 적합한 액추에이터를 제작합니다. 많은 휴머노이드 개발자들이 저희의 표준 액추에이터인 ACTILINK-JD로 시작하여, 양산 단계에서는 플랫폼 변경 없이 커스텀 액추에이터로 전환합니다.
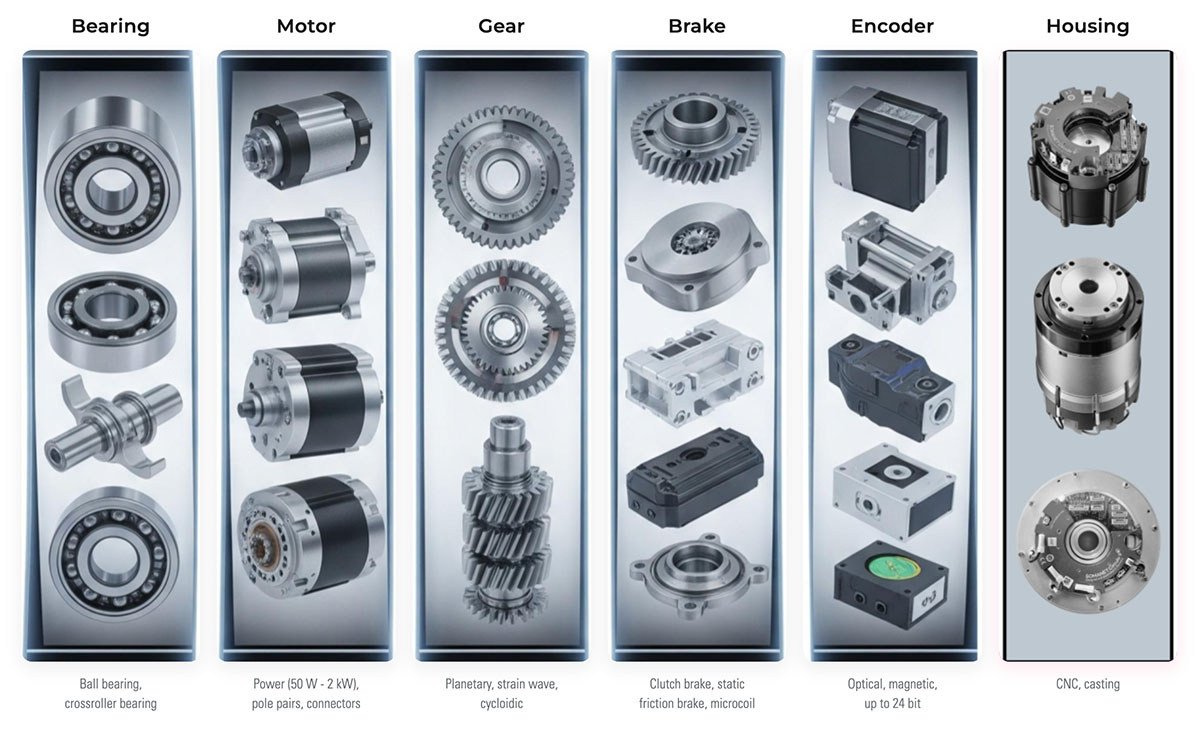
Q: 자체 모터를 사용할 수 있나요?
A: 네. 고객사 또는 타사의 모터도 전기적, 기계적으로 당사의 드라이브 플랫폼과 연결이 가능하다면 통합해 드립니다.
Q: 어떤 기어박스 유형이 가능한가요?
A: 유성 기어, 스트레인 웨이브 기어, 사이클로이드 기어가 주류입니다. 토크-회전수 비율이 허용하는 경우 기어박스가 없는 다이렉트 드라이브 솔루션도 가능합니다.
Q: 토크 측정 기능이 통합되어 있나요?
A: 네. 맞춤형 액추에이터에는 토크 센서가 액추에이터에 직접 통합될 수 있으며, 안전 관련 애플리케이션에 적합한 듀얼 채널 아키텍처도 옵션으로 제공됩니다.
Q: 어떤 수준의 기능 안전성이 가능한가요?
A: IEC 61508, IEC 61800-5-2 및 ISO 13849에 따라 SIL3 PLe까지 가능합니다. 안전 아키텍처는 관절에 따라 차별화될 수 있습니다. 중요한 관절(고관절, 무릎)에는 완전한 안전 기능을 적용하고, 덜 중요한 관절(손목, 손가락)에는 Cat 2 PLd로 충분합니다.
Q: 생산은 누가 담당하나요?
A: Synapticon입니다. 당사는 독일, 스위스, 헝가리, 중국에서 전자 부품 생산을, 독일과 중국에서 기계 부품 생산을, 그리고 4개 대륙에서 시스템 조립을 운영하고 있습니다.