
POSITRON Safety AI란 무엇인가요? POSITRON Safety AI는 Synapticon이 개발한 휴머노이드 로봇용 AI 기반 안전 아키텍처로, 기계적 불안정성과 비결정적 AI 행동을 동시에 해결하는 최초의 인증 가능 솔루션입니다. 플로리안 바이스하르트(Dr.-Ing.) 박사, 팀 프뢰리히(Dr.-Ing.) 박사, 디터 볼퍼트가 공동 집필한 새로운 백서 『Out of the Cage: Advanced Functional Safety for Humanoids』에서는 이 아키텍처를 상세히 설명하고 있습니다.
왜 고전적인 안전 장치가 휴머노이드에 효과가 없는가
휴머노이드 로봇은 불안정한 역진자이다. 산업용 로봇에서 검증된 '정지 카테고리 0'인 고전적인 안전 토크 오프(STO)는 이족 보행 로봇에서 안전한 정지가 아닌 통제 불능의 추락을 초래한다. 로봇 자체가 위험 요소가 된다. 저자들은 휴머노이드 시스템에 대한 전체적인 안전 철학이 재고되어야 함을 보여준다.
세 가지 방어선: 포지트론 세이프티 AI의 구조
POSITRON Safety AI는 SOMANET™ 서보 드라이브와 FSoE 백본(Fail-Safe over EtherCAT)을 기반으로 하는 3단계 안전 아키텍처를 통해 이 문제를 해결합니다:
Tier 1 — 다축 안전 모션: 50개 이상의 자유도를 동시에 제어하는 하드웨어 수준의 안전 기능. 로봇을 정지시키는 대신, Safe Active Damping이 로봇을 제어된 상태로 유지합니다. 안전 제한 속도(SLS) 및 안전 제한 토크(SLT)는 각 구동 장치에서 분산적으로 모니터링됩니다. 이는 휴머노이드 운동학의 복잡성에 맞춰 확장되는 분산형 지능입니다.
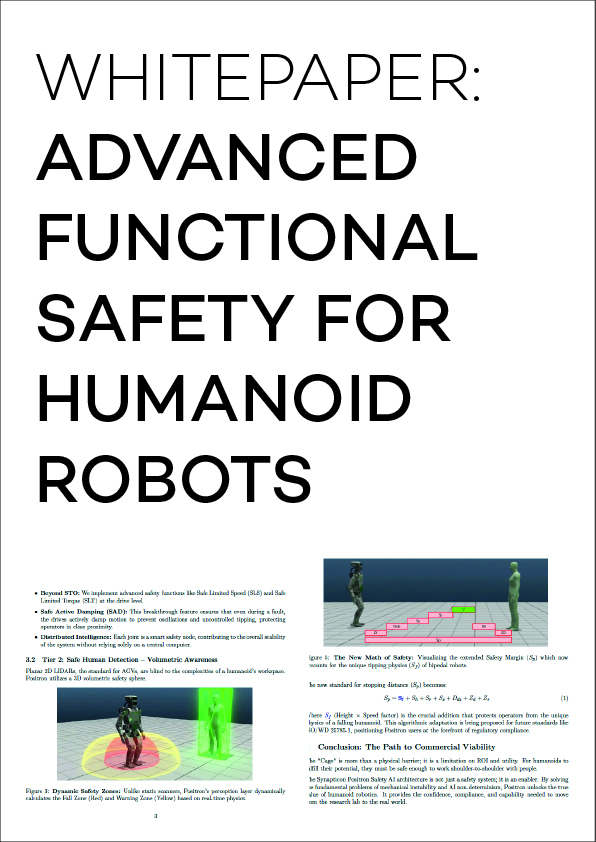
Tier 2 — 안전한 인간 감지: 3D 체적 안전 시스템이 로봇 주변의 사람을 실시간으로 감지합니다. 동적 안전 구역은 정적 최소 거리 기준이 아닌 로봇의 실제 낙하 구역을 기반으로 지속적으로 조정됩니다. 구현은 카메라 기반 보호 시스템에 대한 IEC 62998 표준을 따릅니다.
Tier 3 — AI 행동 안전성: 다중 모달 파운데이션 모델이 장면을 의미론적으로 분석하여 상황 인식 안전 결정(안전한 상황별 동작)을 가능하게 합니다. 이 과정에서 아키텍처는 결정론적 안전 루프와 비결정론적 AI 제어를 ISO/IEC TR 5469 및 ISO/IEC TS 22440에 부합하도록 일관되게 분리합니다.
확장된 안전 공식: 낙하 구역이라는 새로운 매개변수
이 백서의 핵심 혁신은 확장된 안전 거리 공식입니다:
S_p = S_f + S_h + S_r + S_s + D_ds + Z_d + Z_r
새로운 핵심 용어 S_f는 낙하 영역, 즉 넘어지는 휴머노이드 로봇이 덮을 수 있는 범위를 설명합니다. 이 매개변수는 산업용 로봇의 기존 안전 기준에는 존재하지 않지만, 직립 보행 기계에는 물리적으로 필수적입니다.
안전은 제약이 아닌 가능성의 열쇠입니다.
백서의 핵심 메시지: 기능 안전은 공장에서나 공공장소에서 휴머노이드 로봇의 확산을 가로막는 장애물이 아니라, 오히려 그 장벽을 허무는 열쇠이다. 안전을 사후적 의무 사항이 아닌 아키텍처의 필수 구성 요소로 인식할 때, 통제된 실험실 환경 밖에서 휴머노이드 로봇을 활용할 수 있는 기반이 마련된다.

지금 바로 상담해 보세요
개발 초기부터 양산까지, 언제든 편하게 문의하세요.
