
什么是 POSITRON Safety AI?POSITRON Safety AI 是 Synapticon 针对类人机器人开发的人工智能安全架构——这是首个能够同时解决机械不稳定性和非确定性人工智能行为的可认证解决方案。 由 Florian Weißhardt 博士(工学)、Tim Fröhlich 博士(工学)和 Dieter Volpert 共同撰写的新白皮书《走出笼子:类人机器人的高级功能安全》(Out of the Cage: Advanced Functional Safety for Humanoids)详细介绍了该架构。
为什么经典的安全措施对人形机器人不起作用
人形机器人是不稳定的倒置摆。经典的安全扭矩关闭(STO)——工业机器人领域久经考验的“停止类别 0”——在双足机器人身上不会导致安全停机,而是导致失控摔倒。机器人本身就成了危险源。作者们表明,必须重新思考人形系统的整个安全理念。
三道防线:Positron Safety AI 的架构
POSITRON Safety AI通过基于SOMANET™ 伺服驱动器和FSoE 骨干网(Fail-Safe over EtherCAT)的三级安全架构来解决这一问题:
Tier 1 — 多轴安全运动:硬件级安全功能,可同时实现 50 多个自由度。Safe Active Damping 不会关闭机器人,而是以受控的方式将其保持直立。 安全限速 (SLS) 和安全限扭矩 (SLT) 在每个驱动器中进行分散监控——这种分布式智能可随人形机器人运动学的复杂性而扩展。
Tier 2 — 安全人体检测:3D 体积安全系统可实时检测机器人周围的人。动态安全区会根据机器人的实际坠落区域(而不是静态的最小距离)不断调整。该系统符合基于摄像头的保护系统 IEC 62998 标准。
Tier 3 — AI 行为安全:多模态基础模型对场景进行语义分析,并支持基于情境的安全决策(安全情境运动)。该架构严格区分了确定性安全循环与非确定性 AI 控制,符合 ISO/IEC TR 5469 和 ISO/IEC TS 22440 标准。
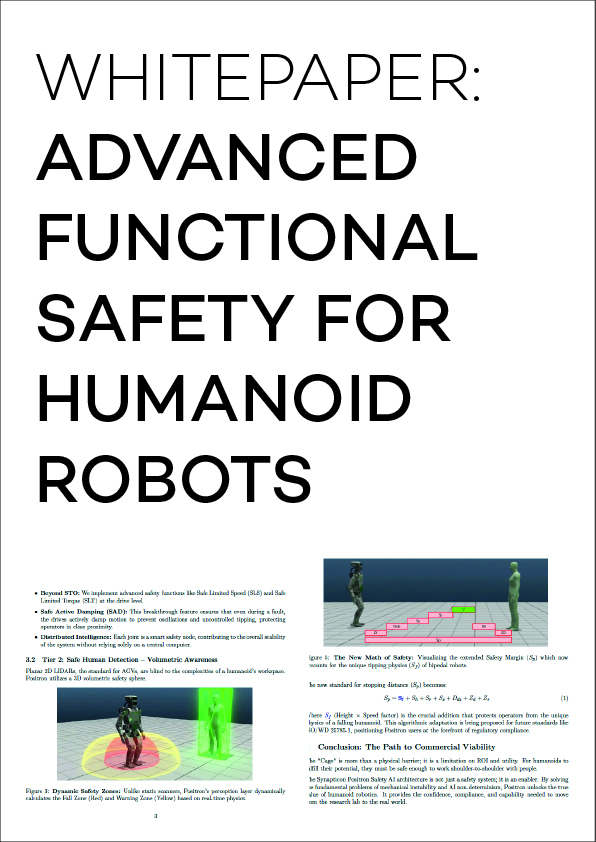
扩展的安全公式:坠落区作为新参数
白皮书的一个核心创新是扩展的安全距离公式:
S_p = S_f + S_h + S_r + S_s + D_ds + Z_d + Z_r
关键的新术语 S_f 描述了坠落区域——即坠落的人形机器人可能覆盖的区域。该参数在任何经典的工业机器人安全标准中均未出现,但对于直立行走的机器而言,该参数在物理上是必不可少的。
安全是推动力,而不是限制因素
白皮书的核心信息:功能安全并不是阻碍人形机器人进入工厂车间或公共空间的障碍——它是打开笼子的钥匙。将安全视为架构的组成部分,而不是事后必须履行的义务,才能为在受控实验室环境之外使用人形机器人创造条件。

