Examples of use

AMR Drive Units and Lift Systems
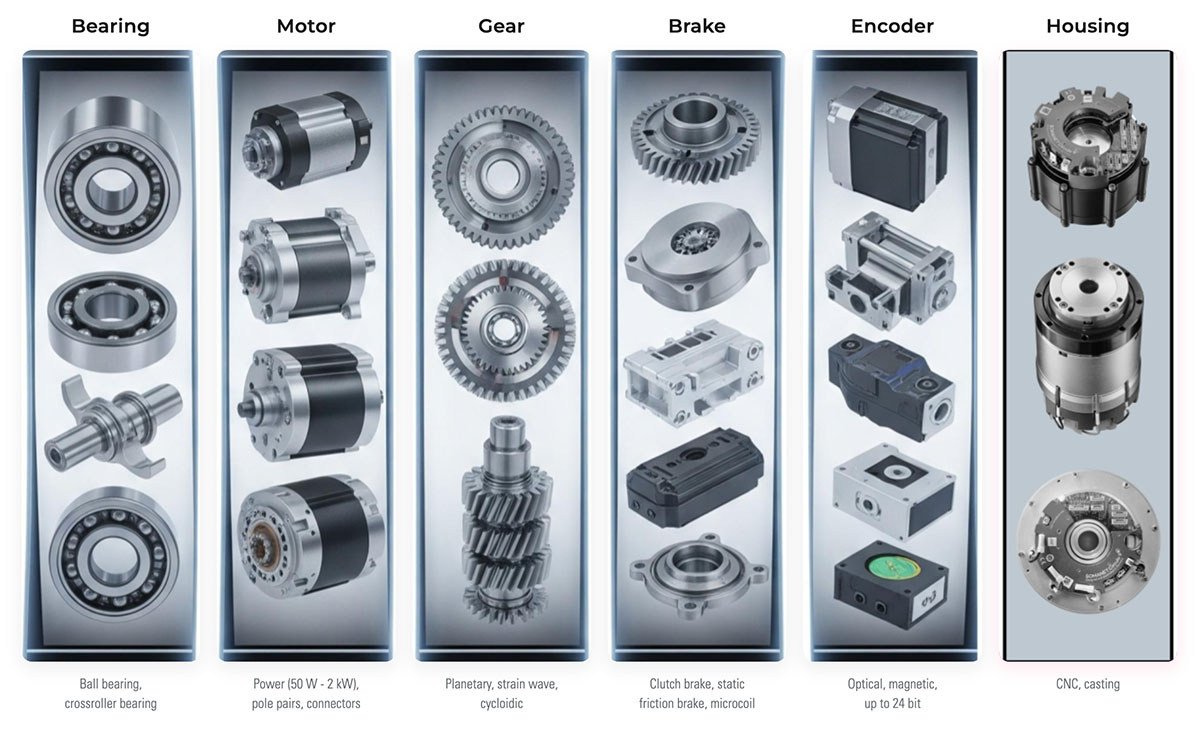
Mobile robots require different mechanical components for each axis: drive, lift, and steering. Custom Actuators enable a unified drive and software concept across mechanically diverse designs—while remaining fully suitable for mass production.
Humanoid joint actuators:
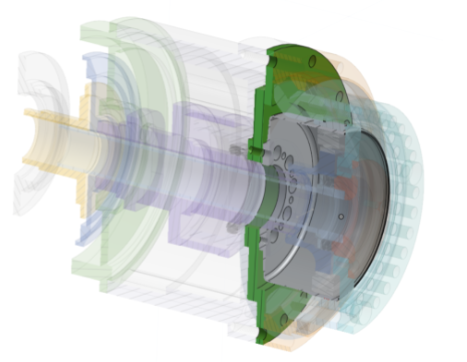
Joint-specific actuators with housings integrated into the robot's frame. No redundant material, no redundant weight. The hip joint and wrist joint can vary in cost and weight.

Cobot joints in the Volume
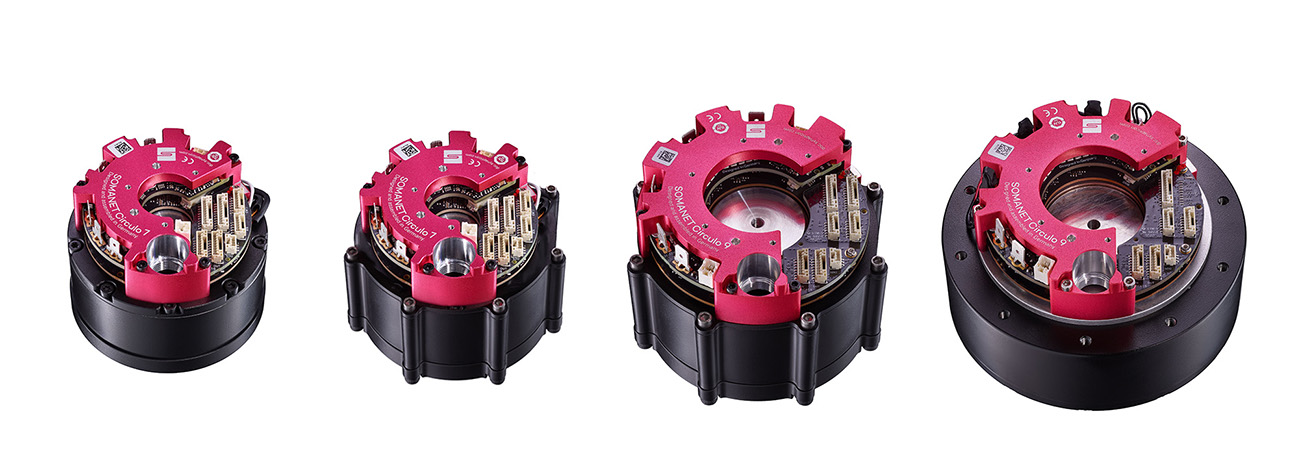
Catalog products are ideal for cobot prototypes. For mass production, the cobot joint becomes a custom actuator that is seamlessly integrated into the arm’s mechanical design—at significantly lower BOM costs.
Robot Dogs and Quadrupeds
Highly dynamic actuators that fit into flat, weight-optimized housings. Using ACTILINK-JD as the platform base and custom mechanics for the specific leg design.

Precision Robotics with Integrated Torque Measurement
Custom Actuators with dual-channel torque sensors and SIL3 PLe safety architecture for medical robotics, semiconductor equipment, and collaborative applications requiring high force accuracy.
FAQ
Q: How do Custom Actuators differ from ACTILINK-JD or ACTILINK-JP?
A: ACTILINK-JD and ACTILINK-JP are our standard actuators—immediately available, well-documented, and perfect for prototypes and medium-volume production. Custom Actuators are developed when mechanical requirements, interfaces, or volume exceed the capabilities of our standard products.
Q: Are Custom Actuators suitable for humanoid robots?
A: Yes—humanoid robots are one of the strongest drivers for Custom Actuators. Each joint has different requirements: hips and knees need high torque and full functional reliability, while shoulders and wrists require compactness and low weight. We build the right actuator for each joint—with a joint-specific safety level, the robot body acting as a heat sink, and joint-specific computing. Many humanoid developers start with our standard ACTILINK-JD actuator and switch to a custom actuator for series production—without changing platforms.
Q: Can we use our own motor?
A: Yes. We also integrate customer-supplied or third-party motors, provided they can be electrically and mechanically connected to our drive platform.
Q: What types of gearboxes are available?
A: Planetary, strain wave, and cycloidal are the established options. Direct-drive solutions without gearboxes are also possible if the torque-to-speed ratio allows it.
Q: What about integrated torque measurement?
A: Yes. Custom Actuators can have a torque sensor integrated directly into the actuator—optionally in a dual-channel architecture suitable for safety-critical applications.
Q: What level of functional safety is possible?
A: Up to SIL3 PLe according to IEC 61508, IEC 61800-5-2, and ISO 13849. The safety architecture can be differentiated depending on the joint—critical joints (hip, knee) receive full safety, while less critical ones (wrist, fingers) can manage with Cat 2 PLd.
Q: Who handles production?
A: Synapticon. We operate electronics manufacturing facilities in Germany, Switzerland, Hungary, and China; mechanical manufacturing facilities in Germany and China; and systems assembly operations on four continents.