en

N°1
INTEGRATED
MOTION
MOTION





A high torque helps to keep the robot in a precise position even under load and to prevent unwanted yielding.
Made from durable materials and advanced technology to withstand even intensive use and ensure consistent performance over time.
Highly configurable with modular components, tools and software to meet a wide range of industry-specific requirements.
Equipped with collision detection and user-friendly interaction protocols, it ensures safe and smooth collaboration in working environments with close proximity to people.

| Unit | AL-JP 14 | AL-JP 17 | AL-JP 20 | AL-JP 25 | AL-JP 32 | |
|---|---|---|---|---|---|---|
| Torque Density (Peak) | Nm/kg | 27.9 | 36.9 | 44.5 | 50.1 | 63.2 |
| Gear Type | Strain Wave | Strain Wave | Strain Wave | Strain Wave | Strain Wave | |
| Reduction Ratio * | - | 101:1(*) | 101:1(*) | 101:1(*) | 101:1(*) | 101:1(*) |
| Rated Torque @ Baseline Motor Speed | N.m | 9.6 | 22 | 34 | 64 | 137 |
| Peak Torque | N.m | 34 | 66 | 102 | 194 | 411 |
| No-load speed | rpm | 70 | 46 | 45 | 38 | 27 |
| Outer Diameter | mm | 72 | 80 | 90 | 110 | 142 |
| Length | mm | 117.7 | 128.2 | 141.0 | 154.1 | 162.8 |
| Hollow Shaft Diameter | mm | 11 | 11 | 11 | 18 | 18 |
| Weight | g | 1220 / 1238 | 1790 / 1808 | 2290 / 2308 | 3870 / 3894 | 6500 / 6524 |
| Voltage Range | V | 24 - 48 V, 60 V peak | 24 - 48 V, 60 V peak | 24 - 48 V, 60 V peak | 24 - 48 V, 60 V peak | 24 - 48 V, 60 V peak |
| Motor encoder | 19 bit single-turn | 19 bit single-turn | 19 bit single-turn | 20 bit single-turn | 20 bit single-turn | |
| Output encoder | 19 bit multi-turn with battery | 19 bit multi-turn with battery | 19 bit multi-turn with battery | 20 bit multi-turn with battery | 20 bit multi-turn with battery | |
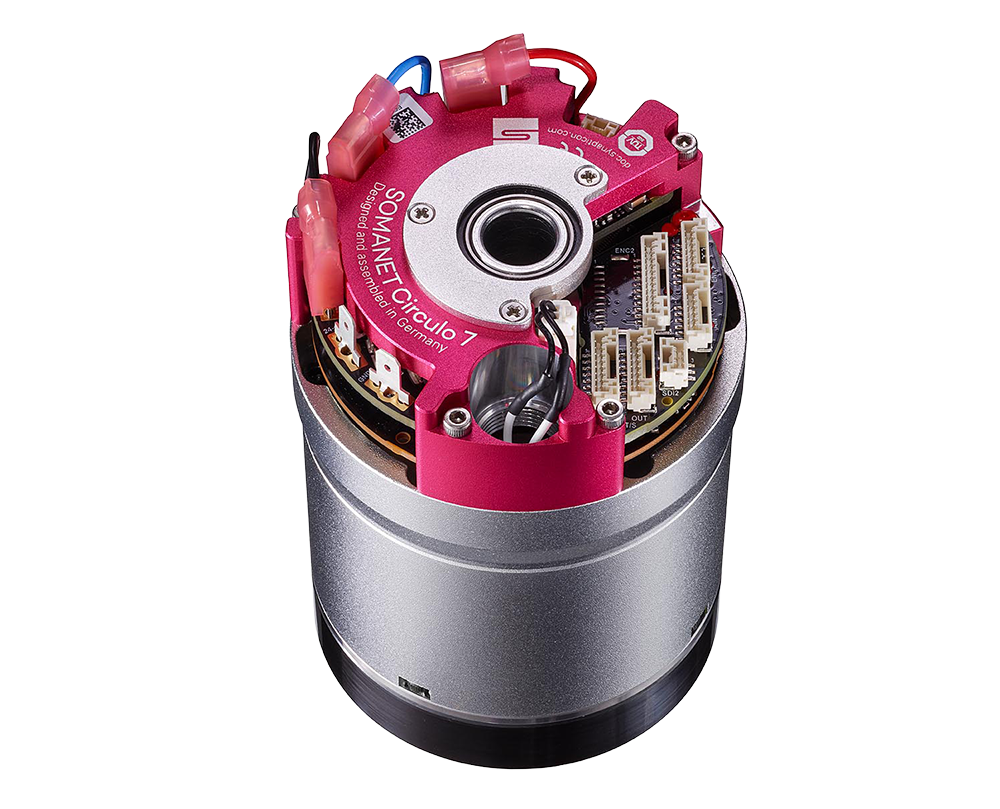
| Servo Drive | CR7-48-24-ECDL / ECDLSM | CR7-48-24-ECDL / ECDLSM | CR7-48-24-ECDL / ECDLSM | CR9-48-60-ECDL / ECDLSM | CR9-48-60-ECDL / ECDLSM | |
| Safety Functions | SS = STO-SBC, SM = SafeMotion via FSoE (SIL3, PLe, Cat 3.) | SS = STO-SBC, SM = SafeMotion via FSoE (SIL3, PLe, Cat 3.) | SS = STO-SBC, SM = SafeMotion via FSoE (SIL3, PLe, Cat 3.) | SS = STO-SBC, SM = SafeMotion via FSoE (SIL3, PLe, Cat 3.) | SS = STO-SBC, SM = SafeMotion via FSoE (SIL3, PLe, Cat 3.) | |
| Equipped Brake | Spring-Applied Friction Brake | Spring-Applied Friction Brake | Spring-Applied Friction Brake | Spring-Applied Friction Brake | Spring-Applied Friction Brake | |
| Communication Protocol | EtherCAT (DS402) | EtherCAT (DS402) | EtherCAT (DS402) | EtherCAT (DS402) | EtherCAT (DS402) |
