
What is POSITRON Safety AI? POSITRON Safety AI is Synapticon’s AI-based safety architecture for humanoid robots—the first certifiable solution that simultaneously addresses mechanical instability and non-deterministic AI behavior. The new white paper “Out of the Cage: Advanced Functional Safety for Humanoids” by Dr.-Ing. Florian Weißhardt, Dr.-Ing. Tim Fröhlich, and Dieter Volpert describes the architecture in detail.
WHY CLASSIC SAFETY DOESN'T WORK FOR HUMANOIDS
Humanoid robots are unstable inverted pendulums. A classic Safe Torque Off (STO) — the proven "Stop Category 0" from industrial robotics — does not lead to a safe stop in a two-legged robot, but to an uncontrolled fall. The robot itself becomes a danger. The authors show that the entire safety philosophy for humanoid systems needs to be rethought.
THREE LINES OF DEFENSE: THE ARCHITECTURE OF POSITRON SAFETY AI
POSITRON Safety AI addresses the problem with a three-tier safety architecture based on SOMANET™ servo drives and the FSoE backbone (Fail-Safe over EtherCAT):
Tier 1 — Multi-Axis Safe Motion: Hardware-level safety functions for more than 50 degrees of freedom simultaneously. Instead of shutting down the robot, Safe Active Damping keeps it upright in a controlled manner. Safely-Limited Speed (SLS) and Safely-Limited Torque (SLT) are monitored decentrally in each drive — distributed intelligence that scales with the complexity of humanoid kinematics.
Tier 2 — Safe Human Detection: A 3D volumetric safety system detects people in the robot's environment in real time. Dynamic safety zones continuously adapt based on the robot's actual fall zone, not static minimum distances. Implementation complies with IEC 62998 for camera-based protection systems.
Tier 3 — AI Behavioral Safety: Multimodal foundation models analyze the scene semantically and enable context-aware safety decisions (safe situational motion). The architecture consistently separates the deterministic safety loop from the non-deterministic AI control — in compliance with ISO/IEC TR 5469 and ISO/IEC TS 22440.
THE EXPANDED SAFETY FORMULA: FALL ZONE AS A NEW PARAMETER
A key innovation in the white paper is the expanded safety distance formula:
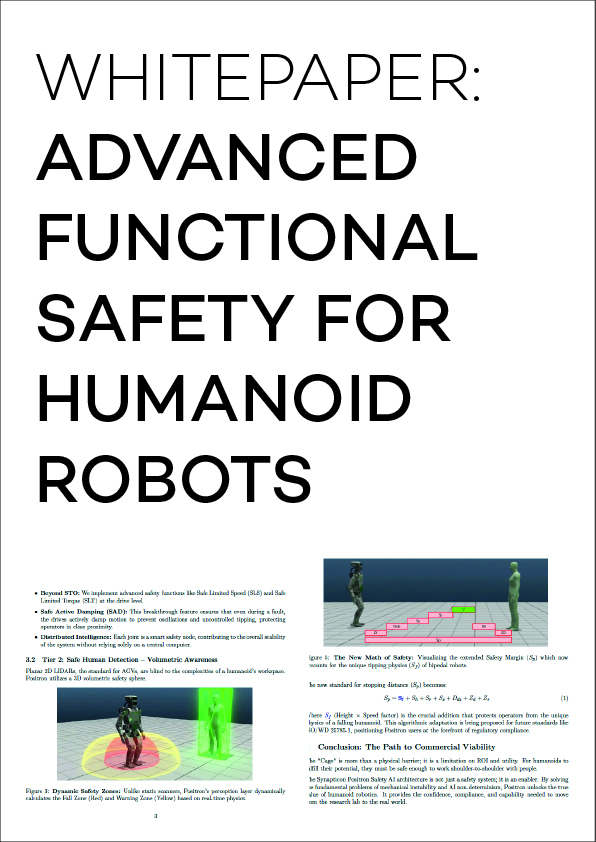
S_p = S_f + S_h + S_r + S_s + D_ds + Z_d + Z_r
The decisive new term S_f describes the fall zone — the area that a falling humanoid robot can cover. This parameter does not exist in any classic safety standard for industrial robots, but is physically essential for upright walking machines.
SAFETY AS AN ENABLER — NOT AS A RESTRICTION
The core message of the white paper: Functional safety is not the obstacle that keeps humanoid robots out of factory floors or public spaces—it is the key that unlocks the cage. Those who view safety not as an afterthought but as an integral part of the architecture are creating the conditions for the use of humanoid robots outside of controlled laboratory environments.
Download the complete white paper "Advanced Functional Safety for Humanoid Robots" now for free →

